Environments define learning problems. They can be used to execute behaviors and measure their performance.
The following table gives an overview of the environments that are provided by BOLeRo.
| Environment name | Usecase |
|---|---|
| Objective Function | Benchmark functions for black-box optimization |
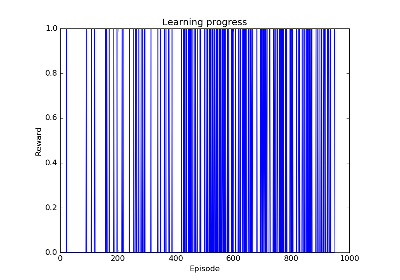
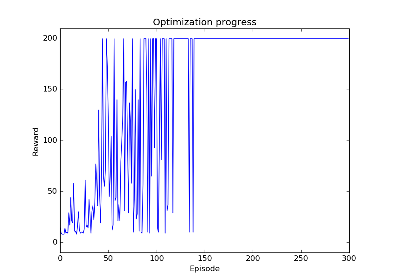
| OpenAI Gym | Benchmark problems for reinforcement learning |
| Optimum Trajectory | Optimize a trajectory to avoid obstacles and minimize the effort |
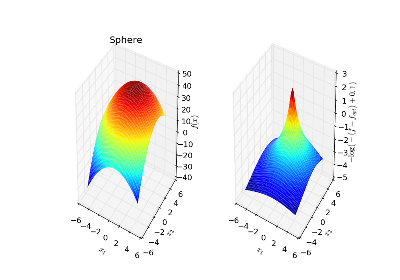
Several benchmark functions to compare continuous black-box optimizers are
provided by the environment ObjectiveFunction. The objective
functions are the same as in the software COCO.
bolero.environment.ObjectiveFunction¶The environment OpenAiGym is a wrapper for
OpenAI Gym environments.
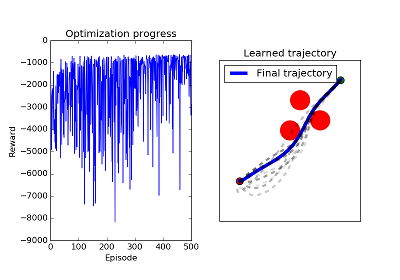
The environment OptimumTrajectory is designed to use behavior learning
algorithms for simple planning problems. The goal is to avoid obstacles and
minimize the effort used for the trajectory, e.g. by minimizing the velocities
or accelerations.
bolero.environment.OptimumTrajectory¶The following table gives an overview of the contextual environments that are provided by BOLeRo.
| Environment name | Usecase |
|---|---|
| Contextual Objective Function | Contextual benchmark functions for contextual black-box optimization |
| Catapult | Benchmark problem for contextual policy search |
Several contextual benchmark functions to compare continuous, contextual
black-box optimizers are provided by the environment
ContextualObjectiveFunction. The contextual objective functions are
based on the functions that are provided with COCO.
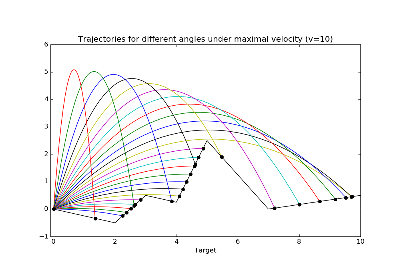
The Catapult environment is a benchmark problem for contextual policy search.
It is a two-dimensional environment like the one displayed in the figur below.
The goal is to hit the ground at a target specified on the x-axis. The target
is given by the context vector.
bolero.environment.Catapult¶