
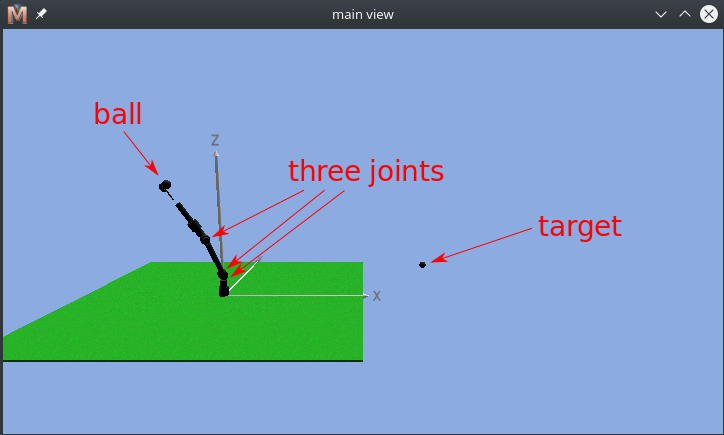
This guide will explain how to set up a MARS-based environment for BOLeRo. We published an example for a MARS environment in a separate project. We will go through this example step by step here. In the end you will see something like this:
The structure of a project that provides a MARS-based environment always looks very similar to this one.
throwing_environment/
The hardest part of creating a new simulation environment is usually to define the scene (everything that is located in configuration/). We cannot solve this problem here. Instead, we can refer to Phobos. Phobos is a plugin for Blender. It enables the creation and modification of WYSIWYG robot models and those can be exported to MARS scenes (and other formats). We will take a closer look at the implementation of the scene with existing configuration files (everything that is located in src/).
Building a MARS-based environment is straightforward and not much different to the standard CMake-based build process:
mkdir build
cd build
cmake_debug .. # this is different, 'cmake_debug' knows where bolero-dev is
make install
We do not use cmake .. because we want to install the environment to our BOLeRo installation. cmake_debug and cmake_release do automatically set the correct CMAKE_INSTALL_PREFIX.
We will show and explain important parts of this environment. For further details, please take a look at the full source code.
A MARS environment depends on BOLeRo and the base class for MARS environments.
pkg_check_modules(BOLERO "bolero")
include_directories(${BOLERO_INCLUDE_DIRS})
pkg_check_modules(MARS_ENV "mars_environment")
include_directories(${MARS_ENV_INCLUDE_DIRS})
link_directories(${MARS_ENV_LIBRARY_DIRS})
The environment will be compiled to a library.
set(SOURCES src/ThrowingEnvironment.cpp)
set(HEADERS src/ThrowingEnvironment.h)
add_library(${PROJECT_NAME} SHARED ${SOURCES})
target_link_libraries(${PROJECT_NAME}
${MARS_ENV_LIBRARIES}
${MARS_UTILS_LIBRARIES}
${CONFIGMAPS_LIBRARIES})
The following files have to be installed: the library, headers, pkg-config information, and scene configuration files.
# Install the library into the lib folder
install(TARGETS ${PROJECT_NAME} ${_INSTALL_DESTINATIONS})
# Install headers into mars include directory
install(FILES ${HEADERS} DESTINATION include/bolero/${PROJECT_NAME})
# Prepare and install necessary files to support finding of the library
# using pkg-config
configure_file(${PROJECT_NAME}.pc.in ${CMAKE_BINARY_DIR}/${PROJECT_NAME}.pc @ONLY)
install(FILES ${CMAKE_BINARY_DIR}/${PROJECT_NAME}.pc DESTINATION lib/pkgconfig)
install(FILES configuration/throwing.smurfs
DESTINATION configuration/${PROJECT_NAME}/)
install(DIRECTORY configuration/robot
DESTINATION configuration/${PROJECT_NAME})
install(DIRECTORY configuration/target
DESTINATION configuration/${PROJECT_NAME})
Our ThrowingEnvironment is a subclass of mars_environment::MARSEnvironment and, in this case, BOLeRo’s ContextualEnvironment. A contextual environment defines a problem that can be parameterized by a context vector.
namespace bolero {
namespace throwing_environment {
class ThrowingEnvironment : public mars_environment::MARSEnvironment,
public ContextualEnvironment {
The following functions have to be implemented.
virtual void initMARSEnvironment();
virtual void resetMARSEnvironment();
virtual void handleMARSError();
virtual int getNumInputs() const;
virtual int getNumOutputs() const;
virtual void createOutputValues();
virtual void handleInputValues();
virtual int getFeedback(double *feedback) const;
bool isEvaluationDone() const;
bool isBehaviorLearningDone() const { return false; }
virtual double* request_context(double *context,int size);
virtual int get_num_context_dims() const;
In ThrowingEnvironment::initMARSEnvironment() we load the configuration of the environment.
void ThrowingEnvironment::initMARSEnvironment()
{
readConfig();
request_context(targetPos.data(), 2);
if(!isSceneLoaded)
{
std::string sceneFile = getConfigPath() +
"/throwing_environment/throwing.smurfs";
control->sim->loadScene(sceneFile.c_str());
isSceneLoaded = true;
}
getMotorIDs();
}
void ThrowingEnvironment::readConfig()
{
// Parameters of the environment are in the file "learning_config.yml".
// It should be located in the current working directory. This
// environment accepts the additional parameters
// - ballThrowTime: after this has been reached (number of time steps),
// the ball will be detached from the robot
// - armHeight: simulates that the arm is mounted on a table, this is the
// height of the table, the simulation stops when the ball hits the
// virtual ground
// - verbose - verbosity level
ConfigMap learningConfigMap = ConfigMap::fromYamlFile("learning_config.yml");
if(learningConfigMap.find("Environment") != learningConfigMap.end())
{
if(learningConfigMap["Environment"].find("ballThrowTime") != learningConfigMap["Environment"].endMap())
ballThrowTime = (learningConfigMap["Environment"])["ballThrowTime"];
if(learningConfigMap["Environment"].find("armHeight") != learningConfigMap["Environment"].endMap())
armHeight = learningConfigMap["Environment"]["armHeight"];
if(learningConfigMap["Environment"].find("verbose") != learningConfigMap["Environment"].endMap())
verbose = (learningConfigMap["Environment"])["verbose"];
}
}
std::string ThrowingEnvironment::getConfigPath()
{
// Here we use the environment variable "ROCK_CONFIGURATION_PATH" in
// order to "find" the smurf file to be loaded. During installation it
// should be put in "$ROCK_CONFIGURATION_PATH/spacebot_throw_environment".
std::string configPath = std::string(getenv("ROCK_CONFIGURATION_PATH"));
if(configPath.empty())
throw std::runtime_error("WARNING: The ROCK_CONFIGURATION_PATH is not "
"set! Did you \"source env.sh\"?\n");
return configPath;
}
void ThrowingEnvironment::getMotorIDs()
{
motorIDs.clear();
std::vector<mars::interfaces::core_objects_exchange>::iterator it;
std::vector<mars::interfaces::core_objects_exchange> motorList;
control->motors->getListMotors(&motorList);
for(it = motorList.begin(); it != motorList.end(); ++it)
motorIDs.push_back(it->index);
}
To reset the environment, we usually have to set the joint angles to the initial state.
void ThrowingEnvironment::resetMARSEnvironment()
{
fitness = 0.0;
evaluation_done = false;
setStartAngles();
}
void ThrowingEnvironment::setStartAngles()
{
for(unsigned int i=0; i < motorIDs.size(); i++)
{
inputs[i] = startAnglePos(i);
control->motors->setMotorValue(motorIDs[i], startAnglePos(i));
}
dataMutex.lock();
handleInputValues();
createOutputValues();
dataMutex.unlock();
}
ThrowingEnvironment::handleMARSError() will be called when an exception occurs during simulation. We should set a very bad fitness and finish the evaluation in the environment.
void ThrowingEnvironment::handleMARSError()
{
fitness = -DBL_MAX;
evaluation_done = true;
}
After each simulation step, this function will be called. Usually we want to output joint states. We could also output sensor measurements.
void ThrowingEnvironment::createOutputValues(void)
{
setPositionOfVisualTarget(); // must always be done, falls down otherwise
outputMotorPositions();
checkBallPosition();
checkMaxTime();
}
void ThrowingEnvironment::setPositionOfVisualTarget()
{
mars::interfaces::NodeId targetId = control->nodes->getID("target_link");
control->nodes->setPosition(targetId, targetPos);
}
void ThrowingEnvironment::outputMotorPositions()
{
for(unsigned int i = 0; i < motorIDs.size(); i++)
outputs[i] = (double)control->motors->getActualPosition(motorIDs[i]);
}
void ThrowingEnvironment::checkBallPosition()
{
mars::interfaces::NodeId ballId = control->nodes->getID("ball_link");
mars::utils::Vector ballPos = control->nodes->getPosition(ballId);
if(ballPos[2] <= -armHeight)
{
ballHitX = ballPos[0];
ballHitY = ballPos[1];
const double diffX = ballPos[0] - targetPos[0];
const double diffY = ballPos[1] - targetPos[1];
const double squaredDist = diffX * diffX + diffY * diffY;
fitness = -squaredDist;
evaluation_done = true;
}
}
void ThrowingEnvironment::checkMaxTime()
{
if(leftTime > MAX_SIMULATION_TIME) {
fitness = DBL_MAX;
evaluation_done = true;
}
}
Before a simulation step is computed, we at least should write the motor commands.
void ThrowingEnvironment::handleInputValues()
{
setMotorValues();
checkBallThrowTime();
}
void ThrowingEnvironment::setMotorValues()
{
for(unsigned int i=0; i < motorIDs.size(); i++)
control->motors->setMotorValue(motorIDs[i], inputs[i]);
}
void ThrowingEnvironment::checkBallThrowTime()
{
if(leftTime > ballThrowTime)
control->joints->removeJoint(control->joints->getID("ball_joint"));
}
In a contextual environment, we have to set the context on request.
double* ThrowingEnvironment::request_context(double *context, int size)
{
if(size != 2)
return NULL;
targetPos[0] = context[0];
targetPos[1] = context[1];
targetPos[2] = -armHeight;
return targetPos.data();
}