
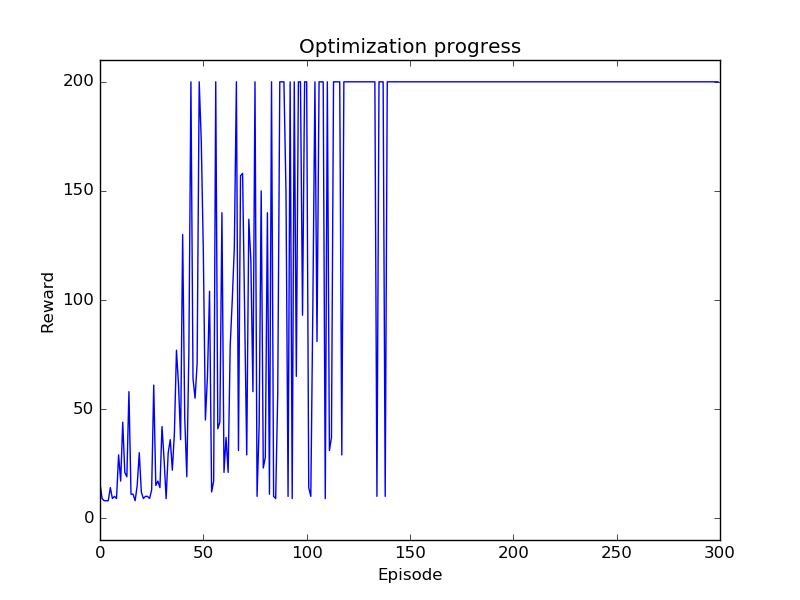
This is an example of how to use the Cart Pole environment from OpenAI Gym via the wrapper that is provided with BOLeRo. A linear policy is sufficient to solve the problem and policy search algorithm usually work very well in this domain.
print(__doc__)
import numpy as np
import matplotlib.pyplot as plt
from bolero.environment import OpenAiGym
from bolero.behavior_search import BlackBoxSearch
from bolero.optimizer import CMAESOptimizer
from bolero.representation import LinearBehavior
from bolero.controller import Controller
beh = LinearBehavior()
env = OpenAiGym("CartPole-v0", render=False, seed=0)
opt = CMAESOptimizer(variance=10.0 ** 2, random_state=0)
bs = BlackBoxSearch(beh, opt)
controller = Controller(environment=env, behavior_search=bs, n_episodes=300)
rewards = controller.learn()
controller.episode_with(bs.get_best_behavior())
plt.figure()
ax = plt.subplot(111)
ax.set_title("Optimization progress")
ax.plot(rewards)
ax.set_xlabel("Episode")
ax.set_ylabel("Reward")
ax.set_ylim(-10, 210)
plt.show()
Total running time of the script: ( 0 minutes 2.487 seconds)