
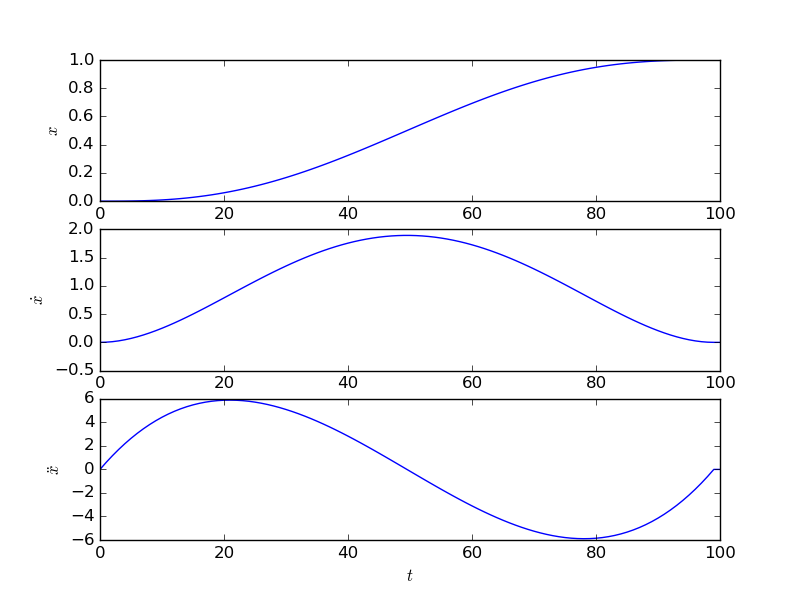
An example for a minimum jerk trajectory is displayed in the following plot.
print(__doc__)
import matplotlib.pyplot as plt
from bolero.datasets import make_minimum_jerk
X, Xd, Xdd = make_minimum_jerk([0], [1])
plt.figure()
plt.subplot(311)
plt.ylabel("$x$")
plt.plot(X[0, :, 0])
plt.subplot(312)
plt.ylabel("$\dot{x}$")
plt.plot(Xd[0, :, 0])
plt.subplot(313)
plt.xlabel("$t$")
plt.ylabel("$\ddot{x}$")
plt.plot(Xdd[0, :, 0])
plt.show()
Total running time of the script: ( 0 minutes 0.229 seconds)